

Hakkımızda
İTÜ AUV Takımı, su altı robotiği alanında edinilen iki yıllık deneyimin ardından, bu birikimi otonom sistemlerle birleştirme hedefiyle 2018 yılında İTÜ Gemi İnşaatı ve Deniz Bilimleri Fakültesi bünyesinde kurulmuştur. Takımımız, deniz teknolojilerinde yenilikçi çözümler geliştirmek ve otonom su altı araçları (AUV) üzerine çalışmalar yürütmek amacıyla faaliyetlerine başlamıştır. Bugüne kadar birçok ulusal ve uluslararası yarışmada ülkemizi başarıyla temsil eden takımımız, mühendislik bilgi birikimini gerçek dünyadaki zorlu problemler üzerinde uygulayarak özgün ve yüksek teknolojili su altı araçları geliştirmektedir.
Misyonumuz
Yenilikçi, disiplinler arası ve sürdürülebilir mühendislik çözümleri geliştirerek, otonom su altı araçları alanında ülkemizi dünya çapında temsil etmek. Takım üyelerimizin teknik ve kişisel gelişimlerini desteklemek, araştırma ve geliştirme süreçlerine aktif katılım sağlayarak onları geleceğin mühendisleri, bilim insanları ve liderleri olarak yetiştirmek.
Vizyonumuz
Türkiye’nin ve dünyanın önde gelen otonom su altı sistemleri takımlarından biri olmak; üniversite-sanayi iş birliklerini güçlendirerek, ileri mühendislik teknolojilerinin gelişimine katkıda bulunmak. Aynı zamanda genç mühendis adaylarının yenilikçi projeler geliştirdiği, öğrenmeyi ve üretmeyi merkezine alan öncü bir öğrenci takımı olmak.
Projelerimiz

Sızdırmaz Gövde ve Flanş Tasarımlarımız
Takım olarak, elektronik bileşenlerin güvenliğini sağlamak için sızdırmaz akrilik hazneler ve CNC işlenmiş alüminyum flanşlar tasarlıyoruz. O-ringli sistemlerle su geçirmezlik testleri yapıyor, her yarışma öncesi basınç altında dayanım kontrolü gerçekleştiriyoruz.
Gripper, Marker Dropper ve Torpido Sistemleri
Yarışma görevlerine özel; nesne bırakma, torpido fırlatma ve nesne yakalama gibi işlevlere sahip mekanizmaları kendi atölyemizde tasarlıyor ve üretiyoruz. Tüm sistemler su altında çalışacak şekilde sızdırmaz ve kompakt yapıda geliştiriliyor.
Yüzdürme ve Ağırlık Merkezi Hesaplamaları
Aracın stabil bir şekilde hareket edebilmesi için yüzdürme kuvveti, kütle dağılımı ve moment hesaplarını yapıyor, COM-COB dengesini optimize ediyoruz. Böylece görevler sırasında aracımız yönünü koruyarak başarılı sonuçlar veriyor.
Test ve Kalibrasyon Sistemleri
Mekanik sistemlerimizi sadece tasarlamakla kalmıyor, aynı zamanda bunların karada ve suda nasıl çalıştığını test eden özel düzeneği de kuruyoruz. Sızdırmazlık, tutuş kuvveti, atış mesafesi gibi verileri ölçerek sistemleri geliştiriyoruz
Lokalizasyon & Navigasyon
Sualtı ortamında konum bilgisi elde etmek oldukça zordur. Bu nedenle, araç içi sensörleri (IMU, DVL, basınç sensörü) birleştirerek aracın konumunu tahmin eden filtreleme algoritmaları geliştiriyoruz. Görevler sırasında aracımızın çevresine göre nerede olduğunu ve nereye gitmesi gerektiğini belirleyen bu yapı, tüm otonom görevlerin temelini oluşturuyor.
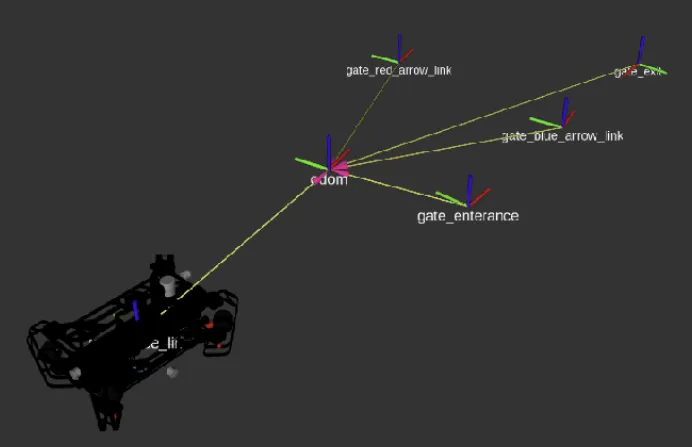
Görüntü İşleme & Mapping
Aracımız üzerinde bulunan ön ve alt kameralar sayesinde görev alanını gerçek zamanlı olarak analiz ediyoruz. Renk, şekil ve boyut gibi görsel ipuçlarını kullanarak hedef nesneleri tespit ediyoruz. Arkada konumlanan RealSense stereo kamera ise derinlik verisi sağlayarak çevresel farkındalığımızı artırıyor. Bu çoklu kamera yapısıyla, hem görev nesnelerini başarıyla tanıyor hem de algılanan nesnelere göre çevresel bir harita (map) oluşturarak aracın görev sahasında bilinçli hareket etmesini sağlıyoruz.
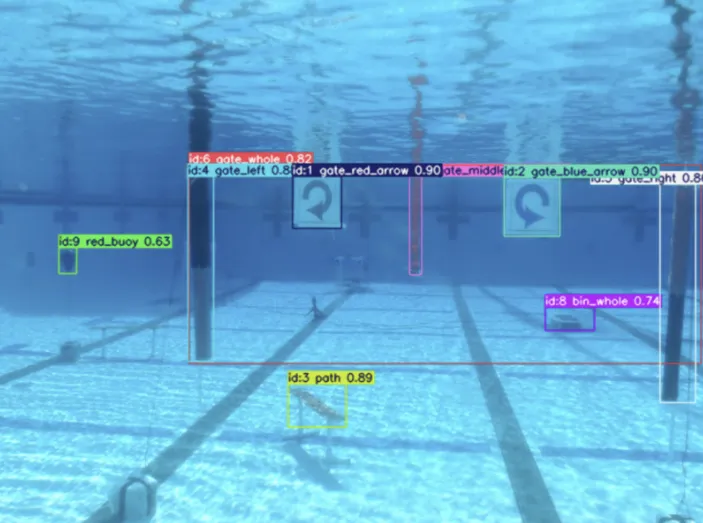
Otonom Sistem & Yapay Zeka
Görevlerin başarıyla tamamlanabilmesi için aracımız, sensörlerinden gelen verilerle çevresini algılayarak bağımsız kararlar alabiliyor. Durum makinesi ve davranış planlayıcı yapılarla görev sıralaması oluşturuluyor. Derin öğrenme destekli modellerle nesne tanıma, hedef takip gibi görevler daha güvenilir ve hızlı hale geliyor.
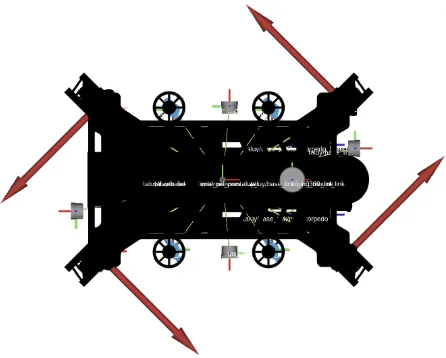
Kontrol Sistemleri
Aracın yönünü ve hızını hassas şekilde kontrol etmek için PID ve model tabanlı kontrol algoritmaları geliştiriyoruz. Altı serbestlik derecesine sahip aracımız, hem yatay hem dikey düzlemde stabil bir şekilde hareket edebiliyor. Kontrolcü yapılar sayesinde görev sırasında sarsılmadan ilerleyen ve hedefe doğru yönelen bir sistem elde ediyoruz.
Akustik Modem ve Haberleşme
Su altında kablosuz veri aktarımını sağlamak için akustik modem teknolojileri üzerinde çalışıyoruz. Takım içi tasarladığımız modemler, düşük bant genişliğine sahip olsa da uzun menzilde komut ve telemetri bilgilerini güvenle iletebiliyor. Böylece araçlarımız görev sırasında yüzeye çıkmadan kontrol ve veri paylaşımı yapabiliyor.
Araç İçi Haberleşme Sistemleri
Takım olarak, aracımızdaki görev bilgisayarı, sensörler ve motor sürücüler arasındaki iletişimi CAN tabanlı haberleşme ağı ile sağlıyoruz. Böylece tüm birimler ortak bir dil üzerinden veri paylaşabiliyor ve senkronize şekilde çalışıyor. Su altında oluşabilecek gürültü ve parazitlere karşı dayanıklı olan bu sistem, görev sırasında kritik bilgilerin güvenli ve kesintisiz aktarılmasına imkan tanıyor.
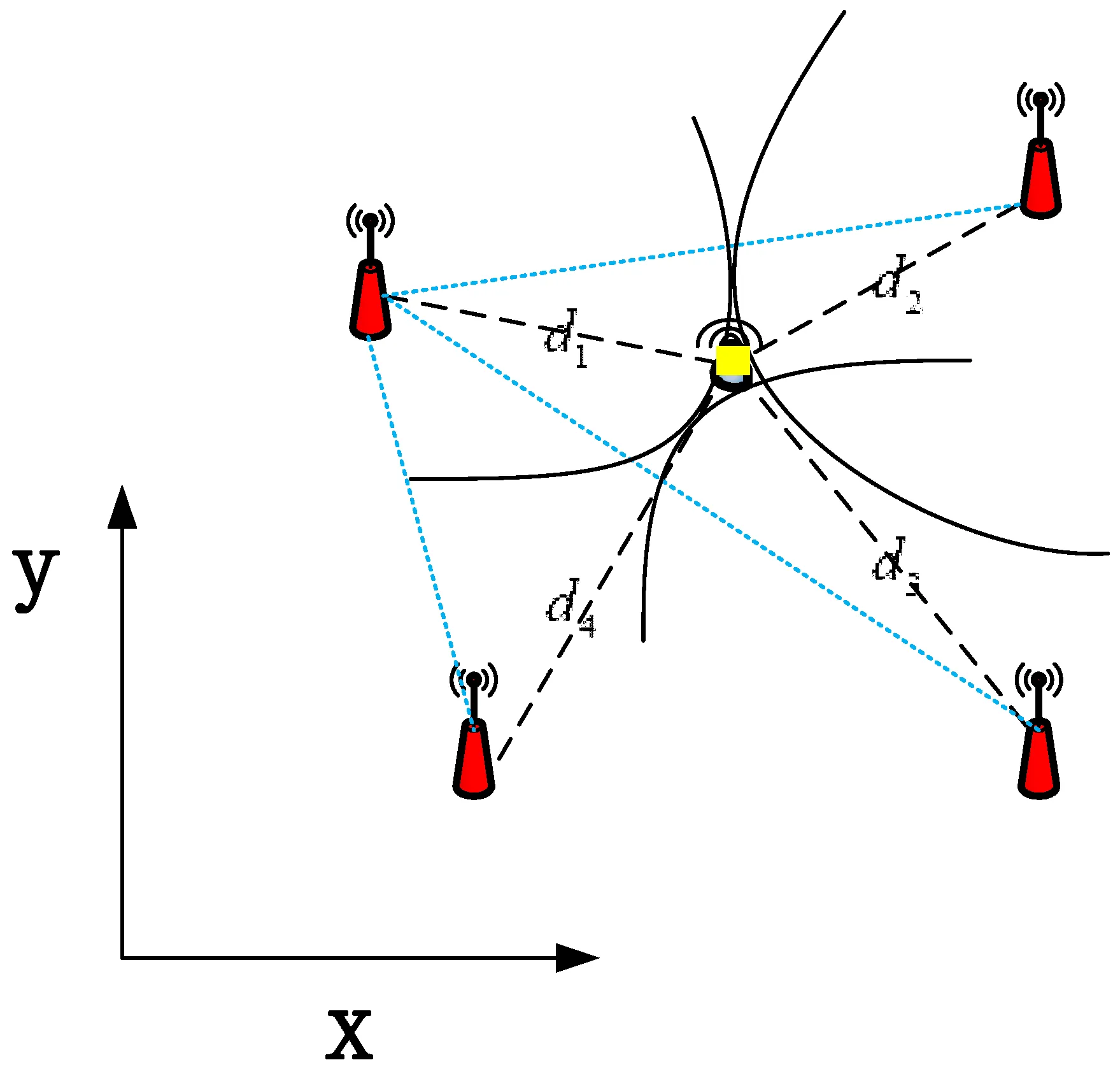
Akustik Lokalizasyon Sistemleri
Sualtı görevlerinde aracın konumunu hassas biçimde belirlemek için çoklu hidrofon dizileri kullanıyoruz. Gelen akustik sinyallerin varış zaman farklarını (TDOA) hesaplayarak aracın üç boyutlu konumunu tespit ediyoruz. Bu sayede navigasyon sistemlerimiz GPS’in çalışmadığı derinliklerde dahi güvenilir konum verisi sağlayabiliyor.
Yaklaşan Etkinlikler
Şu anda planlanmış etkinlik bulunmamaktadır.
Geçmiş Etkinlikler
Geçmiş etkinlik bulunmamaktadır.
Takım Galerisi





Ekibimiz





Başarılarımız

Dünya Şampiyonluğu
2022Singapore AUV Challenge
2013 yılında ilki kez düzenlenen Singapore AUV Challenge (SAUVC), farklı disiplinlerin bir araya gelerek zorlu su altı şartlarında otonom görevler gerçekleştirebilen robotlar üretmesini hedefleyen bir yarışmadır. İTÜ AUV Takımı Türkiye’den katılım sağlayan tek takım olarak 2022 yılında 19 ülkeden 42 farklı AUV takımı ile mücadele etmiş ve Dünya Şampiyonluğu elde etmiştir..

RAMI Competition İkinciliği
2023RAMI Competition
İtalya’nın La Spezia kentinde 2022 senesinde ilki gerçekleştirilen RAMI Competition, operatörler tarafından gerçekleştirilmesi zor olan görevleri barındıran, tamamı otonom görevlerden oluşan bir yarışmadır. Yarışma, La Spezia kentinde açık deniz ortamında gerçekleştirilmektedir. Değişken derinlik, akıntı, bulanık su gibi birçok zorlu görevleri bulunan bu yarışmada, sızıntısı olan bir borunun gözlemlenmesi ve sonrasında su altı araçları tarafından tamamen otonom bir şekilde tamir edilmesi beklenmektedir. Çoğunlukla Avrupa ülkelerinin Lisansüstü derecesindeki takımlarına ev sahipliği yapan bu yarışmaya İTÜ AUV Takımı olarak 2023 yılında katılım gösterip 2. olarak yarışmayı tamamlamış ve En İyi Teknik Sunum Ödülü’ne layık görülmüştür.

En İyi Görev Yapan Takım Ödülü
2024RoboSub 2024
2024 senesinde AUVSI Derneği ve RoboNation tarafından 27. si düzenlenen RoboSub 2024 yarışmasında İTÜ AUV Takımı olarak Taluy isimli aracımız ve ekibimizle büyük bir başarıya imza attık. Teknik Sunum kategorisinde birincilik, Teknik Dokümantasyon kategorisinde üçüncülük ve iki görevi eş zamanlı gerçekleştirebilen tek takım olarak En İyi Görev Yapan Araç ödülüne layık görüldük. Bu başarılarımız, takımımızın mühendislik yetkinliğini ve otonom sistemlerdeki inovatif yaklaşımını bir kez daha ortaya koydu.
İletişim Bilgileri
E-posta
auv@itu.edu.trAdres
Reşitpaşa, Park Yolu, Bisiktelevi 2. Kat, 34485 Sarıyer/İstanbul
Danışman
Danışman bilgisi bulunmamaktadır.